AGIRobots Inc.(總公司:愛知縣名古屋市,代表取締役:赤見坂篤記)在此宣布,公司已著手開發自有QDD(Quasi Direct Drive:準直驅動)致動器,並已完成原型機的設計、製造及基本驅動確認。
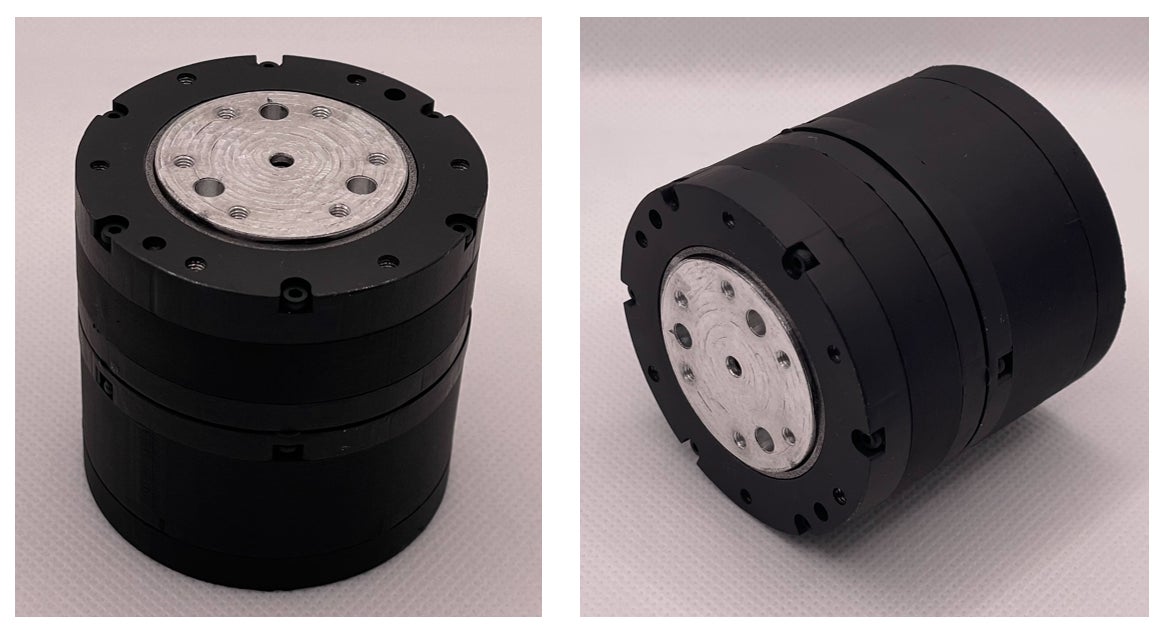
自主開發的QDD原型機
QDD的重要性背景
QDD是一種結合了相對低減速比的減速機與高輸出馬達的驅動方式,易於兼顧高輸出、高響應性和高控制性。近年來,它已成為需要敏捷且精細動作的機器人(如四足機器人、人形機器人)的關鍵技術之一。
目前,機器人的核心零件,特別是QDD,存在高度依賴海外產品的狀況。
另一方面,隨著實體AI的進展和機器人的日益複雜化,致動器已不再僅僅是零件,而是逐漸成為決定機器人性能本身的重要要素。
我們認為,未來為了提升競爭力,機器人製造商建立自主設計和開發致動器的體系至關重要,而非依賴外部供應商。此外,從地緣政治風險和供應限制的角度來看,建立國內的開發和供應體系的重要性預計將進一步提高。
本次開發的原型機
在此背景下,本公司正致力於致動器(包括減速機、馬達和控制系統)的自主化開發。我們旨在透過建立一個能夠從關節驅動的根本進行設計的體系,而非僅僅採購和使用現成產品,來優化自有機器人的性能並確立未來的競爭優勢。
本次開發的原型機主要針對手臂機器人應用,目標輸出功率為約30Nm級。其主要特點如下:
・外形尺寸為57mm的緊湊型設計
・減速機自主設計與製造
・採用BLDC馬達
・採用雙編碼器配置
特別值得一提的是,減速機是自主設計和製造的。我們採用BLDC馬達作為驅動源,其配置旨在滿足機器人應用所需的輸出性能和響應速度。此外,透過採用雙編碼器配置,更容易掌握馬達側和輸出側的狀態,旨在提高操作性,包括初始對準和回位動作。
原型機驅動影片
此項取り組み並非僅停留在概念階段,我們已經完成了原型機的基本驅動確認。本公司重視透過實際硬體進行驗證,而非僅停留在概念,本次原型開發也是該過程的一部分。
原型機驅動演示影片(YouTube)
未來展望
該致動器目前處於原型階段,未來我們計劃從耐久性、能源效率、控制性、熱設計等方面進行改良。
此外,為了未來的量產化和性能提升,我們也考慮與製造、零件和控制領域的合作夥伴企業進行協作。
AGIRobots將持續推進機器人核心技術的自主化開發,為未來開發自有手臂、雙臂機器人和人形機器人奠定基礎。
FACT BOX · 重點整理
- 來源:PR TIMES
- 分類:新聞