【研究摘要與重點】
針對透明容器或具光澤的包裝材料等傳統3D測量技術難以處理的對象,開發出一項能從單台相機影像推算形狀,並使機器手臂能夠進行抓取的技術。
即便在需要從多個視角進行觀測的情況下,也開發出一種能兼顧形狀推算精度與移動距離,並自動決定拍攝位置與移動路徑的方法。
經實機機器人驗證,抓取成功率達到96.0%,與傳統方法相比,相機移動距離縮短了52%,整體處理執行時間縮短了19%。
本研究成果預期將能促進過去依賴人工之製程的自動化,並透過高精度抓取與高效動作的並行,為提升生產力做出貢獻。
【研究概要】
東京理科大學創域理工學部機械航空宇宙工學科的荒井翔悟副教授,以及同大學研究所創域理工學研究科機械航空宇宙工學專攻的Kenis Ginga(2025年度碩士課程二年級)研究小組,針對透明物體或具光澤物體等機器手臂難以抓取的對象,開發了「3D測量(*1)」與「抓取規劃(*2)」的方法。此外,在手眼配置(*3)中,成功減少了影像拍攝所需的移動時間與處理時間。
過去,透明容器或具光澤的包裝材料因表面光線的反射與穿透,導致深度感測器或一般3D測量變得不穩定,使得機器手臂的自動抓取相當困難。因此,本研究小組著眼於一種結合了不易受光學特性影響的RGB影像語義分割(*4),以及從多視角輪廓資訊復原形狀的「Shape from Silhouette(*5)」之方法。然而,多視角拍攝雖然能提升精度,但相機移動耗時,如何與製造現場要求的作業時間(節拍時間)取得平衡成為了一項課題。為了解決此課題,研究小組導入了能同時提升3D測量精度並縮短相機移動距離的成本函數,進而優化了拍攝位置與移動路徑。
在實機機器人的驗證中,針對透明、具光澤及不透明物體達成了96.0%的抓取成功率,並與基準方式相比,成功將相機移動距離縮短了52%,整體處理執行時間縮短了19%。
本研究實現了針對具有困難光學特性物體抓取的穩健性,以及削減了伴隨多視角觀測而來的時間成本。這將擴大機器人的應用範圍,預期能為製造現場的自動化推進與生產力提升做出貢獻。
本研究成果已於2026年1月12日刊載於國際學術期刊「IEEE ROBOTICS AND AUTOMATION LETTERS」線上版。此外,本成果預計將於機器人領域的頂級會議「2026 IEEE International Conference on Robotics & Automation(ICRA 2026)」中發表,正受到全球矚目。
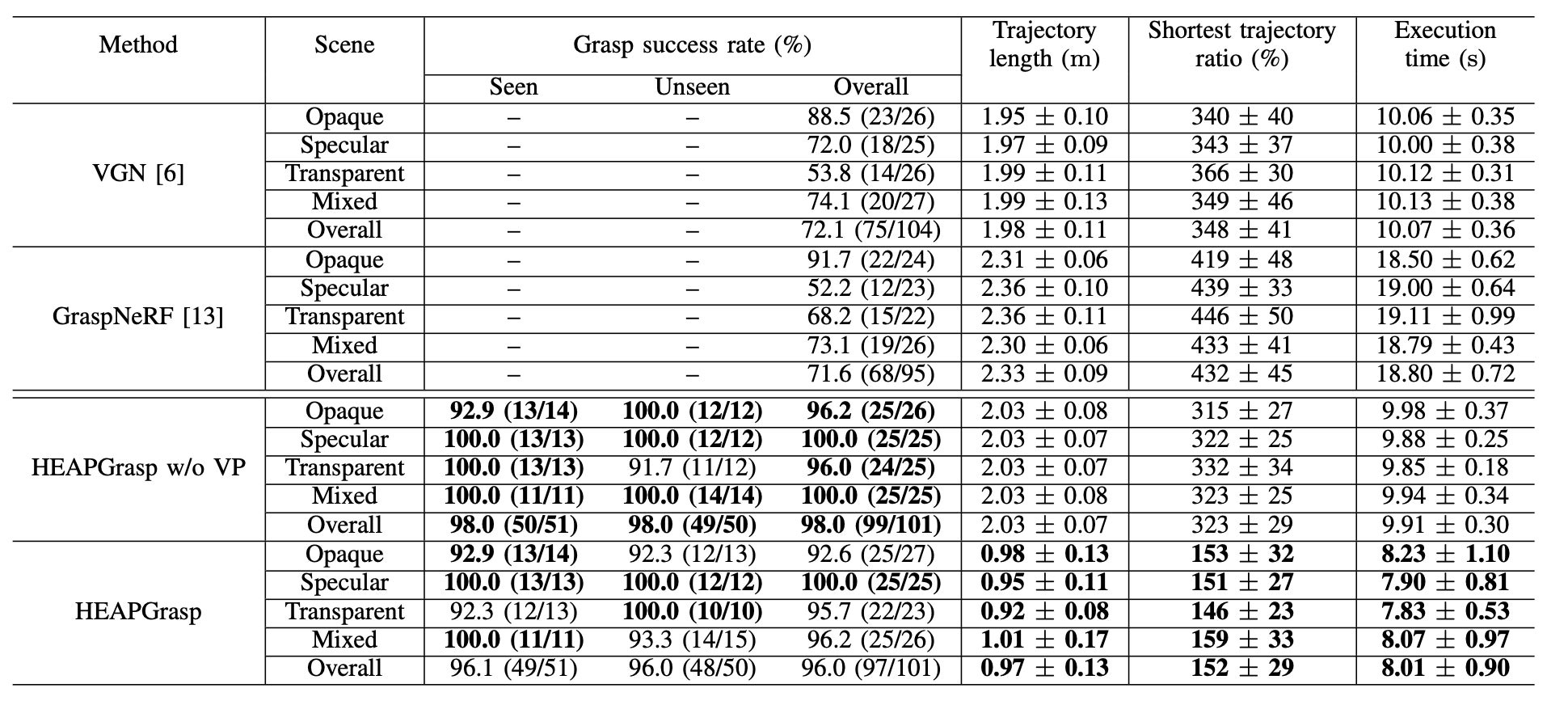
圖1 先行研究(VGN, GraspNeRF)與本研究開發之方法(HEAPGrasp w/o VP, HEAPGrasp)的性能比較
圖2 (左)透明物體抓取情形 (中)透明袋裝物體抓取情形 (右)光澤物體抓取情形
【研究背景】
機器手臂是能自動執行零件或產品的抓取、移載、排列等作業,並為工廠及生產現場的生產力提升與減少人力作業做出貢獻的裝置。近年來,隨著高精度相機與3D測量技術的發展,其應用已擴展至複雜作業。然而,針對透明物體或具光澤物體,因光線反射與穿透的影響,3D測量變得不穩定,存在自動抓取困難的課題。此外,若要精確掌握對象物的姿勢與位置,必須從多個視角進行相機拍攝,這需要耗費測量與處理時間。結果導致作業節拍時間下降,進而降低了系統整體的效率。
因此,本研究小組著眼於利用RGB影像進行語義分割以及Shape from Silhouette。進一步地,透過導入能平衡3D測量精度與相機移動距離的成本函數,並優化手眼相機的軌跡,旨在同時實現精度與效率。
【研究結果詳情】
本研究使用傳統基準方法(VGN、GraspNeRF)與新開發的方法(HEAPGrasp、HEAPGrasp w/o VP),進行了實機機器人驗證。
傳統方法VGN在不透明物體上達成了88.5%的抓取成功率,但在光澤物體上降至72.0%,透明物體上降至53.8%。GraspNeRF也呈現相同趨勢,在不透明物體上達成了91.7%的抓取成功率,但在光澤物體上降至52.2%,透明物體上降至68.2%。相對地,本研究開發的HEAPGrasp w/o VP與HEAPGrasp在所有類別中皆達成了92.6%以上的高抓取成功率。此外,對於學習時未使用的未知物體也展現出強大的泛化能力,分別達成了98.0%與96.0%的抓取成功率。此成功率的差異,主要源於3D測量精度的不同。
傳統方法GraspNeRF因需要在作業空間周圍設置6個視角,故需要2.33公尺的相機移動距離與18.8秒的執行時間。另一方面,本研究開發的HEAPGrasp w/o VP將相機移動距離縮短至2.03公尺,執行時間縮短至9.91秒。進一步地,HEAPGrasp與HEAPGrasp w/o VP相比,將相機移動距離削減了52%至0.97公尺,執行時間削減了19%至8.01秒。
主導本研究的荒井副教授表示:「在製造與物流現場,透明托盤或光澤袋等難以自動化的對象仍存在於製程中,成為依賴人力的瓶頸。因此,我們致力於開發一種不易受光學特性影響,且能以最小必要動作實現『看見並抓取』的機制。本研究成果預期將能推動過去依賴人力的製程機器人化,並為提升生產力做出貢獻。此外,透過減少事前調整的設計,將使導入現有設備及對應多品種變得更加容易。未來,我們目標實現即使在換線頻繁或對象物增加的現場,也能根據運作條件輕鬆生成最佳動作的機器人系統。」
【用語】
*1: 3D測量
利用相機或距離感測器,將對象物的位置與形狀作為3D資訊(x, y, z)取得的技術。是機器人掌握對象物精確位置與姿勢,並進行抓取或移載的基礎。
*2: 抓取規劃
基於3D測量所得之形狀與姿勢資訊,決定機器人能穩定抓取對象物之位置與姿勢的過程。
*3: 手眼配置
在機器人末端(手部)搭載相機,並根據相機視覺資訊來控制機器人動作的機制。
*4: 語義分割
將影像中的每個像素分類為物體或背景等語義類別的影像辨識方法。由於能以像素層級提取對象物區域,因此被用於提升3D測量或抓取規劃中的對象物辨識精度。
*5: Shape from Silhouette
利用從多個視角取得之對象物輪廓影像,推算3D形狀的方法。雖然難以重現對象物內部形狀,但具有計算相對簡單,且能穩定復原對象物外形的特徵。
【論文資訊】
期刊名稱
:IEEE ROBOTICS AND AUTOMATION LETTERS
論文標題
:HEAPGrasp: Hand-Eye Active Perception to Grasp Objects with
Diverse Optical Properties
作者
:Ginga Kennis and Shogo Arai
DOI
:10.1109/LRA.2026.3653331
※由於PR TIMES系統無法使用上標、下標文字或特殊字元等,正式標記可能與本內容有所差異,敬請見諒。正式標記請參閱東京理科大學網頁(https://www.tus.ac.jp/today/archive/20260327_9176.html)。
FACT BOX · 重點整理
- 來源:PR TIMES
- 分類:research