【Research Summary and Key Points】
We have developed a technology that enables robot arms to grasp objects such as transparent containers and glossy packaging materials, which are difficult for conventional 3D measurement, by estimating their shape from a single camera image.
Even when observations from multiple viewpoints are required, we have developed a method to automatically determine shooting positions and movement paths, considering the balance between shape estimation accuracy and travel distance.
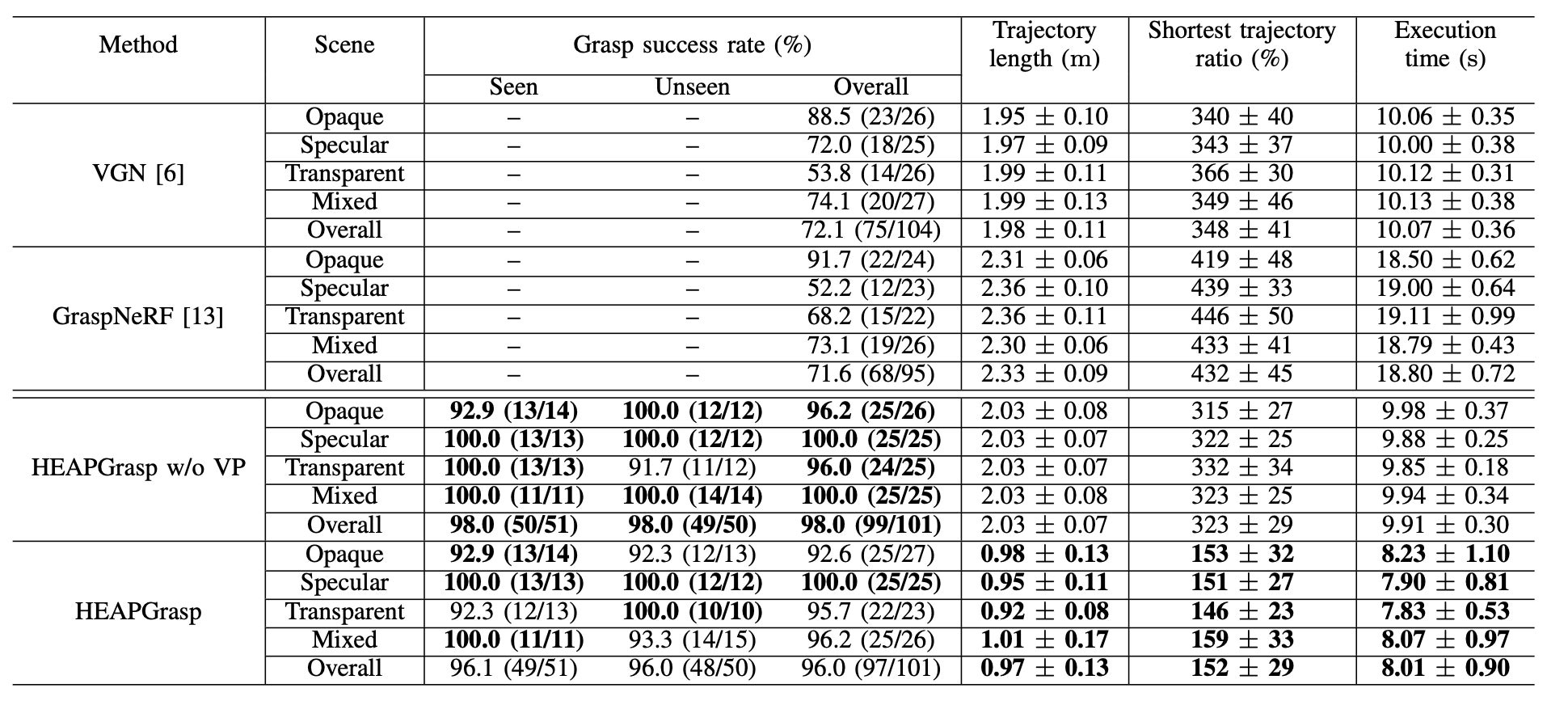
Verification with an actual robot achieved a grasping success rate of 96.0%, reducing camera travel distance by 52% and overall handling execution time by 19% compared to conventional methods.
This research achievement is expected to promote the automation of processes that have so far relied on human hands, and contribute to increased productivity through the combination of high-precision grasping and efficient operation.
【Research Overview】
A research group led by Associate Professor Shogo Arai and Mr. Ginga Kenis (Master's student, 2nd year, AY2025) from the Department of Mechanical and Aerospace Engineering, Faculty of Science and Engineering, Tokyo University of Science, has developed methods for "3D measurement (*1)" and "grasp planning (*2)" for objects that are difficult for robot arms to grasp, such as transparent and glossy objects. They have also succeeded in reducing the image capture movement time and processing time in a "hand-eye configuration (*3)".
Traditionally, transparent containers and glossy packaging materials have been difficult for robot arms to grasp automatically because depth sensors and general 3D measurement become unstable due to light reflection and transmission from the surface. To address this, the research group focused on a method combining "semantic segmentation (*4)" of RGB images, which are less affected by optical properties, with "Shape from Silhouette (*5)" to reconstruct shape from contour information from multiple viewpoints. However, while multi-viewpoint shooting improves accuracy, it takes time for the camera to move, posing a challenge in meeting the work time (takt) required in manufacturing sites. To solve this problem, they introduced a cost function that balances improved 3D measurement accuracy with reduced camera travel distance, optimizing shooting positions and movement paths.
In verification with an actual robot, a grasping success rate of 96.0% was achieved for transparent, glossy, and opaque objects. Compared to the baseline method, camera travel distance was reduced by 52%, and overall handling execution time was reduced by 19%.
This research has achieved robustness in grasping objects with difficult optical properties and reduced the time cost associated with multi-viewpoint observation. This is expected to expand the range of robot applications and contribute to the promotion of automation and increased productivity in manufacturing sites.
This research achievement was published online on January 12, 2026, in the international academic journal "IEEE ROBOTICS AND AUTOMATION LETTERS." It is also scheduled to be presented at the 2026 IEEE International Conference on Robotics & Automation (ICRA 2026), a top conference in the field of robotics, attracting global attention.
Figure 1 Preliminary
FACT BOX
- Source: PR TIMES
- Category: News