FullDepth Co., Ltd. (CEO Tomoji Yoshiga, hereinafter FullDepth), Toyo Engineering Corporation (CEO Eiji Hosoi, hereinafter TOYO), NIPPON STEEL ENGINEERING CO., LTD. (CEO Masayuki Ishi, hereinafter NSE), and OKI Electric Industry Co., Ltd. (CEO Takahiro Mori, hereinafter OKI) have jointly conducted a demonstration test aimed at unmanned underwater inspection operations for offshore wind power generation facilities using AUVs*1 (Autonomous Underwater Vehicles). The demonstration test combined FullDepth's remote control technology and autonomous navigation-equipped ROVs*2 (Remotely Operated Vehicles), an ASV*3 (Autonomous Surface Vehicle) owned by our partner company Eightknot Inc. (Location: Sakai City, Osaka Prefecture, CEO Hiroto Kimura), and an AUV owned by our joint research partner, the Maki Laboratory at the Institute of Industrial Science, The University of Tokyo*4. The test was conducted on an OKI-owned barge, simulating underwater inspections of floating offshore wind power generation facilities. Through this demonstration test, FullDepth has identified the current status of underwater inspections of offshore wind power generation facilities using AUVs, ROVs, and ASVs. Furthermore, we have extracted technical and operational challenges for unmanned underwater inspections using these vehicles and proposed concrete future prospects for the social implementation of AUVs and other marine robots. This project was carried out following its adoption into the "Demonstration Project for the Use of Autonomous Underwater Vehicles (AUVs)" by the Cabinet Office's Ocean Policy Research and Development Bureau. ■ Demonstration Test Overview In October 2025, a demonstration test combining ROVs, ASVs, and AUVs was conducted in Numazu City, Shizuoka Prefecture. Inspection operations were performed on the underwater sections of the observation target*5 using video and sonar (detection using sound waves). Through the demonstration test, we extracted technical and operational challenges (such as inspection methods for underwater sections and operational systems) for the autonomous and unmanned underwater inspection of offshore wind power generation facilities. For more details on this demonstration test, please refer to this PR video.
PR Video for Demonstration Test: You can view the background of the demonstration test, the test in progress, and the test results. ■ Proposal for a Roadmap towards Social Implementation of AUVs Based on the challenges identified in the demonstration test, we have considered the future vision of underwater inspection systems anticipated for 2030 and 2040, with the aim of conducting underwater inspections of offshore wind power generation facilities more efficiently and at a lower cost. Specifically, we considered optimal configurations for marine robotics such as AUVs, including system configurations that can perform wide-area inspections autonomously and unmanned by combining ASVs and AUVs. In addition, we have organized the necessary milestones for the early social implementation of AUVs and other marine robots by 2030, including continuous technological development, verification, and long-term implementation tests, and proposed them as a roadmap.
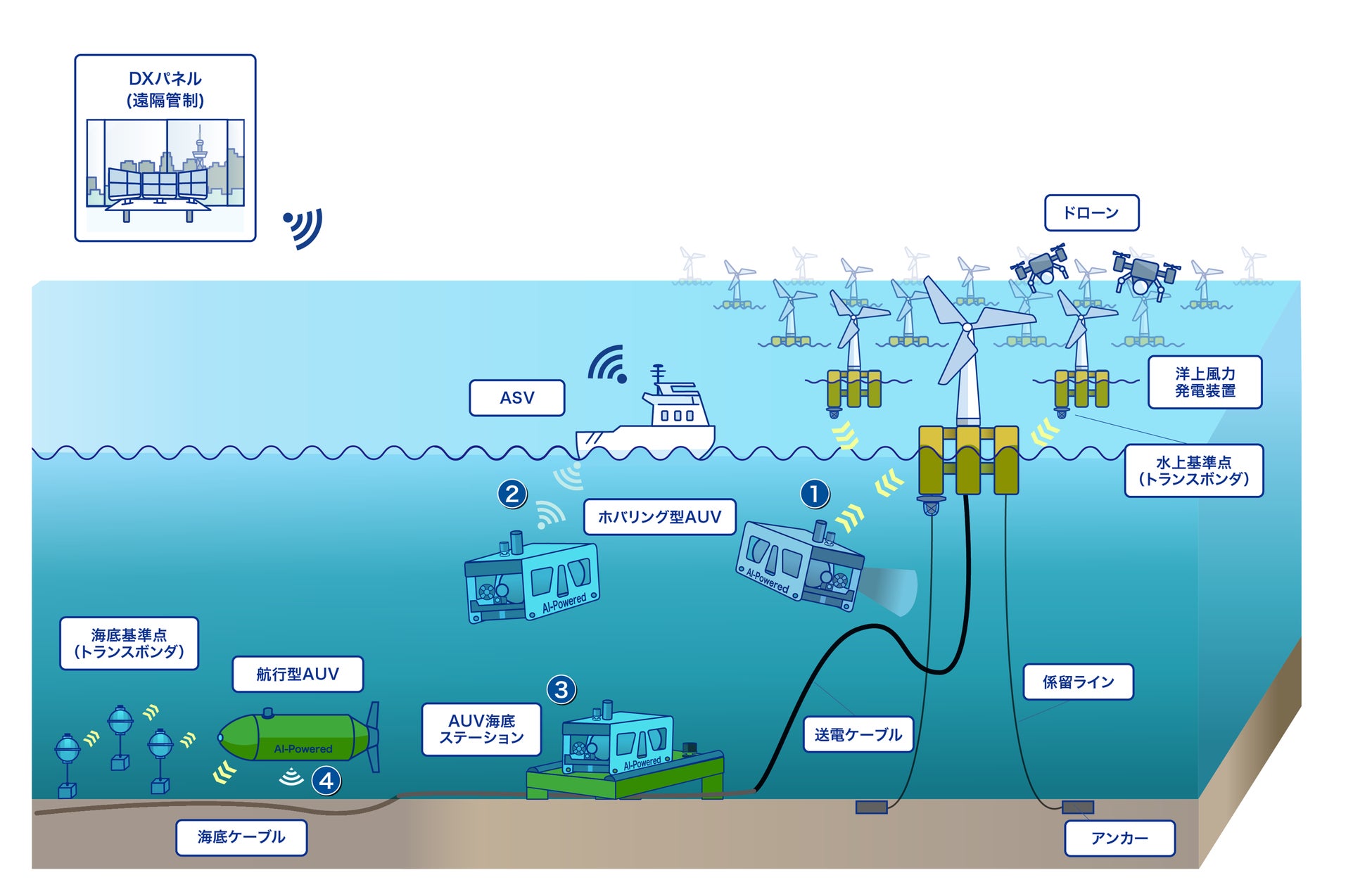
<figcaption class="pr-img__item__capt
FACT BOX
- Source: PR TIMES
- Category: Survey