【研究摘要與重點】
我們開發出了一項技術,即使是傳統 3D 測量難以處理的透明容器或光澤包裝材料等物體,也能夠從單一攝影機影像中估計其形狀,並讓機械手臂得以抓取。
即使需要從多個視角進行觀測,我們也開發了一種方法,能夠在形狀估計的精度與移動距離之間取得平衡,自動決定拍攝位置與移動路徑。
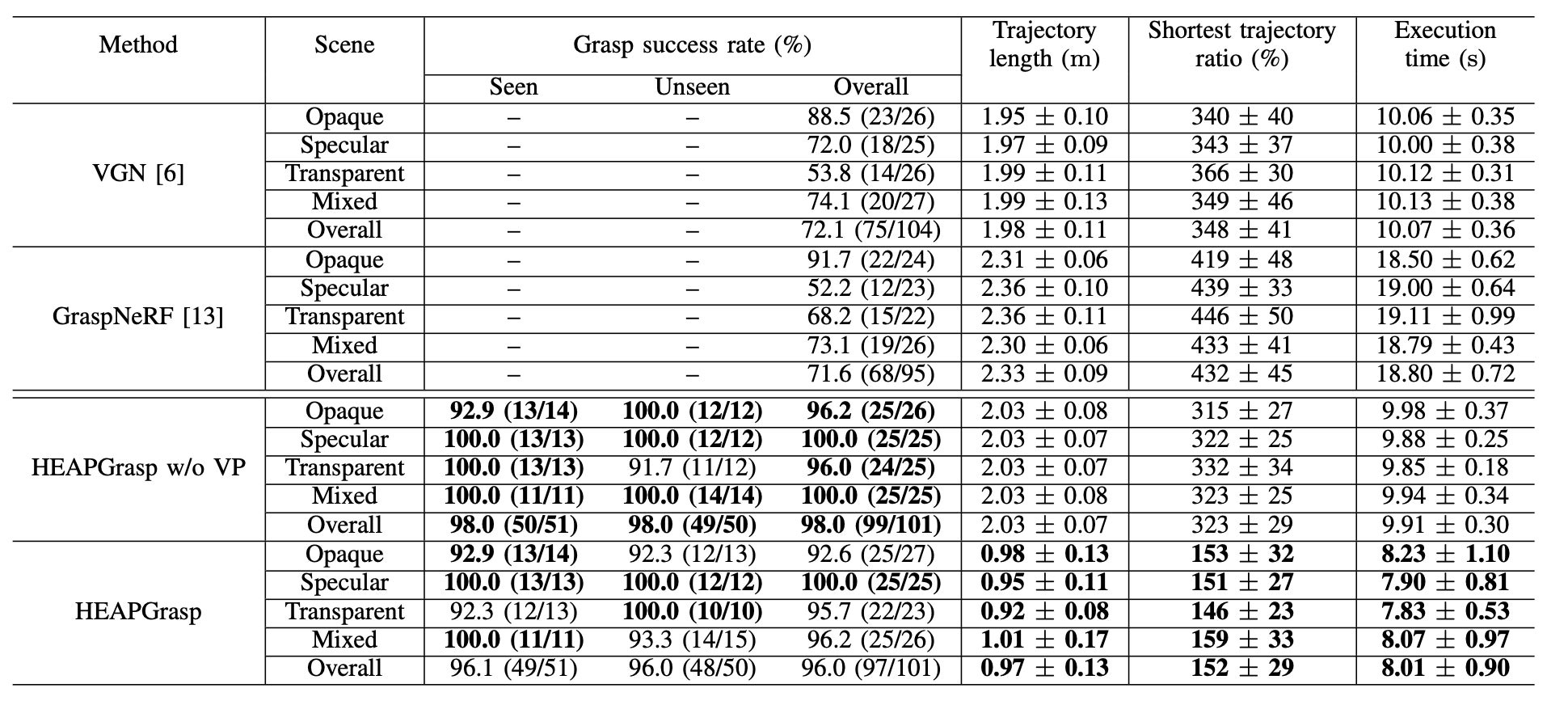
透過實際機械手臂的驗證,達到了 96.0% 的抓取成功率,與傳統方法相比,攝影機移動距離縮短了 52%,整體處理執行時間縮短了 19%。
這項研究成果預期將能推動過去依賴人工的製程自動化,並透過高精度抓取與高效率動作的結合,為提升生產力做出貢獻。
【研究概要】
東京理科大學創域理工學部機械航空宇宙工學科的荒井翔悟副教授,以及同大學大學院創域理工學研究科機械航空宇宙工學專攻的ケニス 銀河氏(2025 年度碩士課程 2 年級)的研究團隊,開發了針對機械手臂難以抓取的透明或光澤物體進行「3D 測量(*1)」與「抓取規劃(*2)」的方法。此外,他們也在「手眼配置(*3)」中成功削減了影像拍攝所需的移動時間與處理時間。
過去,由於表面光線的反射與穿透,深度感測器與一般 3D 測量在處理透明容器或光澤包裝材料時會變得不穩定,導致機械手臂難以自動抓取。為了解決這個問題,該研究團隊著眼於結合不易受光學特性影響的 RGB 影像「語義分割(*4)」與從多視角輪廓資訊重建形狀的「Silhouette 變形(Shape from Silhouette)(*5)」的方法。然而,多視角拍攝雖然能提高精度,但攝影機的移動需要時間,這與製造現場要求的作業時間(節拍)之間的平衡成為一大課題。為了解決這個課題,他們導入了兼顧 3D 測量精度提升與攝影機移動距離縮短的成本函數,以最佳化拍攝位置與移動路徑。
在實際機械手臂的驗證中,針對透明、光澤及不透明物體,達到了 96.0% 的抓取成功率,並與基準方法相比,成功將攝影機移動距離縮短了 52%,整體處理執行時間縮短了 19%。
本研究實現了對於具有困難光學特性的物體進行抓取的穩健性,以及削減多視角觀測所伴隨的時間成本。這預期將擴大機器人的應用範圍,並為推動製造現場的自動化與提升生產力做出貢獻。
本研究成果已於 2026 年 1 月 12 日線上刊登於國際學術期刊「IEEE ROBOTICS AND AUTOMATION LETTERS」。此外,本成果預計將發表於機器人領域的頂級會議 2026 IEEE International Conference on Robotics & Automation(ICRA 2026),引起全球關注。
圖 1 初步
FACT BOX · 重點整理
- 來源:PR TIMES
- 分類:新聞