東洋工程株式會社(代表取締役社長 細井榮治,以下簡稱 TOYO)與日鐵工程株式會社(代表取締役社長 石倭行人,以下簡稱 NSE)、FullDepth 株式會社(代表取締役社長 吉賀智司,以下簡稱 FullDepth)、沖電氣工業株式會社(代表取締役社長 森孝廣,以下簡稱 OKI)共同合作,針對利用 AUV*¹(自主式水下航行器)等設備,實現離岸風力發電設施水下檢修作業無人化的系統,提出了社會實施路線圖。本路線圖旨在針對未來預期將會擴大的離岸風力發電設施,為降低水下檢修作業風險並實現無人化,整理了利用 AUV 等設備進行水下檢修系統的未來願景。
此外,本事業係獲內閣府綜合海洋政策推進事務局之「自主式水下航行器(AUV)利用實證事業」採納後執行。
實證試驗概要
在制定路線圖的過程中,於 2025 年 10 月在靜岡縣沼津市實施了結合 ROV*²(遙控無人潛水機)、ASV*³(自主式海洋無人機)與 AUV 的實證試驗。在本實證試驗中,針對觀測對象*⁴的水下部分進行了影像拍攝與聲納(音波探測)檢修作業,並提取了邁向水下檢修作業自主化與無人化的技術及營運課題(如海底部分檢修方法、營運體制等)。
關於本實證試驗的詳細內容,請參閱此處的 PR 影片。https://youtu.be/GWxvVzF5R9M
實證試驗 PR 影片:以淺顯易懂的方式介紹了實證試驗的背景、試驗過程及試驗結果等。
AUV 社會實施路線圖之提案
基於實證試驗中提取的課題,為達成離岸風力發電設施水下檢修作業之效率化與成本降低,我們探討了 2030 年及 2040 年時的水下檢修系統未來願景。具體而言,為了自主且無人地進行大範圍檢修作業,我們以考量 AUV 等海洋機器人的最佳配置為前提,整理了結合 ASV 與 AUV 的系統架構等方案。同時,我們整理了邁向 2030 年 AUV 等設備早期社會實施的里程碑,包括持續的技術開發與驗證、實施長期實施試驗等,並將其作為路線圖進行提案。
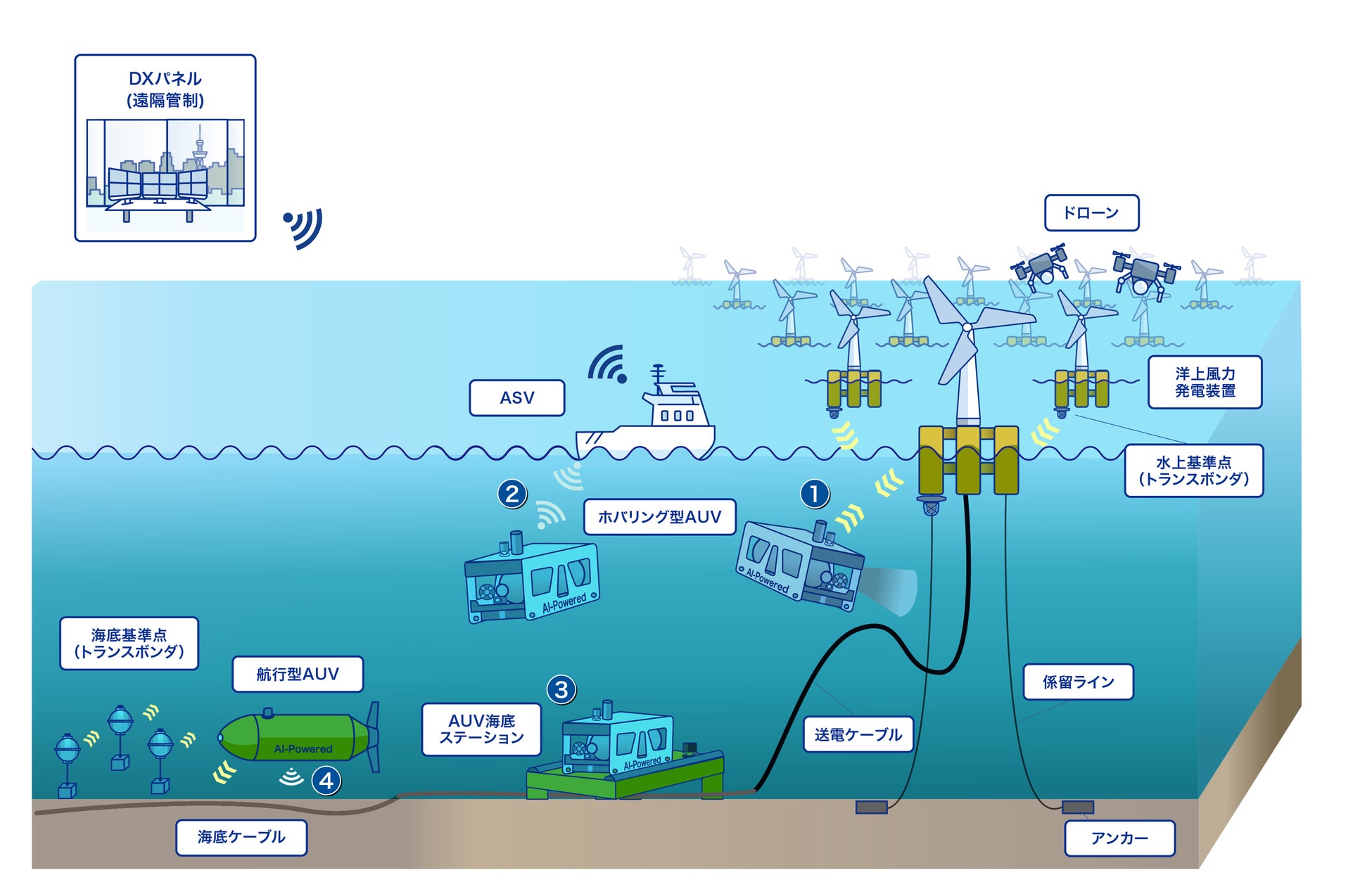
2040 年預期利用 AUV 等海洋機器人的檢修系統未來願景*⁵ ①懸停型 AUV 透過水上基準點的定位輔助掌握自身位置,並檢修繫泊纜線、輸電電纜等。②ASV 透過水下通訊接收 AUV 收集的數據,並傳送至 DX 面板。③AUV 在自身電池電量降低時,會自主移動至海底站進行充電或數據通訊。④航行型 AUV 透過海底基準點的定位輔助掌握自身位置,並利用聲納等設備檢修海底電纜狀態。 插圖:©東洋工程
【TOYO 的主要取り組み】
邁向服務供應商事業化的概念探討
若要將針對離岸風力發電業者等的維護與檢修服務進行事業化,不僅需要利用 AUV 等海洋機器人的技術能力,更重要的是存在一個能夠整合設備開發者、持有者、作業執行者、IT 相關服務提供者等多樣化合作夥伴的技術與系統,並全面支援使用者決策及其執行的「服務供應商」。在本事業中,我們以離岸風力發電事業的維護與檢修作業為前提,探討並整理了服務供應商的角色及其商業模式與生態系統。
離岸風力發電事業中服務供應商的價值創造概念圖
海洋數據利用基礎的概念探討
AUV 等海洋機器人被期待作為獲取國內目前不足之海洋數據的核心海洋觀測資產。在本事業中,為了安全且迅速地流通利用這些資產所獲得的海洋數據,並促進其利用,我們提出了建構「海洋數據空間*⁶」作為基礎設施的方案,並進行了技術面與營運面的探討。透過實現此基礎設施,不僅限於離岸風力發電事業,亦能為水產業、海洋資源開發等多元產業領域間的跨領域海洋數據利用,以及強化 MDA*⁷(海洋狀況掌握)做出貢獻。
未來展望
TOYO 著眼於 2030 年左右 AUV 等設備的社會實施,將透過針對離岸風力發電事業的服務供應商事業化,以及建構有助於強化 MDA 的海洋數據利用基礎等方式,致力於在海洋產業中創造新的價值。
【參考資訊】
實施體制
本事業由以下 4 家公司共同實施。各公司主要負責內容的詳情,請至各公司官網確認。
TOYO
・事業整體統籌 ・邁向社會實施之各項課題彙整與路線圖制定 ・服務供應商、海洋數據利用基礎之探討
NSE
・實證試驗統籌 ・邁向 AUV 等海洋機器人社會實施之營運課題整理 ・服務供應商、海洋數據利用基礎之探討
FullDepth
・ROV「DiveUnit 300 Lite」之提供與運用 ・AUV 等海洋機器人開發中之技術課題整理
OKI
・實證試驗對象之固定式測量駁船「SEATEC NEO」之提供與運用 ・水下基礎設施開發中之技術課題整理
註釋
*1 AUV (Autonomous Underwater Vehicle):指不依賴人類指示、自主運作的無人潛水機。本實證試驗使用了東京大學生產技術研究所卷研究室所開發的「Tri-TON」。
*2 ROV (Remotely Operated Vehicle):指透過遠端操作在水下潛行的無人潛水機。本實證試驗使用了 FullDepth 製造的「DiveUnit300 Lite」。
*3 ASV (Autonomous Surface Vehicle):指透過自主控制在水面航行的無人機。本實證試驗使用了搭載 Eight Knot 株式會社所開發之自主航行平台「Eight Knot AI CAPTAIN」的小型船舶「Eight Knot Ⅰ」。
*4 觀測對象:本實證試驗以 OKI 所擁有的固定式測量駁船「SEATEC NEO」的水下部分作為觀測對象。
*5 2040 年預期利用 AUV 等海洋機器人的檢修系統未來願景:展示了從 2030 年早期社會實施階段起,持續改良技術與系統,最終實現檢修作業完全自主化與無人化的 2040 年左右檢修系統形象。
*6 數據空間 (Data Space):指在不同組織、國家間(生態系統)及異業種間,皆能確保可靠性並共享數據的標準化機制。※引用自獨立行政法人資訊處理推進機構 (IPA):數據空間入門
*7 MDA (Maritime Domain Awareness):指持續收集、整合、分析與海洋安全保障及海洋利用相關的資訊,並綜合掌握狀況的行動。
===相關資訊請由此進入===
・關於內閣府 AUV 利用實證事業
HP:https://www8.cao.go.jp/ocean/policies/auv/auv_pilot_project/pilot_index.html
・實證事業採納時的新聞稿(2025 年 7 月 17 日)
獲內閣府公開招募之「自主式水下航行器(AUV)利用實證事業」採納 ~將利用自主式海洋無人機 (ASV) 與遙控無人潛水機 (ROV) 進行利用實證事業~
關於 TOYO
東洋工程 (TOYO) 創立於 1961 年,是一家建立全球網絡,並為全球 60 多個國家的客戶提供工程服務與工廠建設的綜合工程公司。以創業初期的氨與尿素等化學肥料領域為核心磨練獨有技術,並將事業領域擴展至石油化學、石油與天然氣處理、資源開發、發電等多樣化領域。此外,秉持「以工程為地球與社會的永續發展做出貢獻」的使命,致力於實現永續社會,透過導入環境友善的解決方案與最新技術,積極投入脫碳社會的實現。https://www.toyo-eng.com/jp/ja/
FACT BOX · 重點整理
- 來源:PR TIMES
- 分類:research