東洋工程股份有限公司(代表取締役社長 細井榮治,以下簡稱TOYO)與新日本製鐵工程股份有限公司(代表取締役社長 石倭行人,以下簡稱NSE)、FullDepth股份有限公司(代表取締役社長 吉賀智司,以下簡稱FullDepth)、沖電氣工業股份有限公司(代表取締役社長 森孝廣,以下簡稱OKI)共同提出了利用AUV*¹(自主式水下航行器)等進行離岸風力發電設備水下檢查作業無人化系統的社會實證路線圖。本路線圖旨在整理未來預期擴展的離岸風力發電設備的水下檢查系統的未來願景,以降低風險並實現無人化操作。
本事業是基於獲得內閣府綜合海洋政策推進事務局「自主式水下航行器(AUV)利用實證事業」的認可而實施的。
實證試驗概要
在制定路線圖之前,於2025年10月在靜岡縣沼津市實施了結合ROV*²(遙控無人潛水器)、ASV*³(自主式無人水面載具)和AUV的實證試驗。本次實證試驗對觀測目標*⁴的水下部分進行了影像拍攝和聲納(利用聲波探測)檢查作業,並提取了水下檢查作業自主化和無人化方面的技術及操作課題(海底部分檢查方法、操作體制等)。
關於本次實證試驗的詳細資訊,請觀看此PR影片:https://youtu.be/GWxvVzF5R9M
實證試驗PR影片:影片清晰介紹了實證試驗的背景、試驗情況及試驗結果。
AUV社會實證化路線圖提案
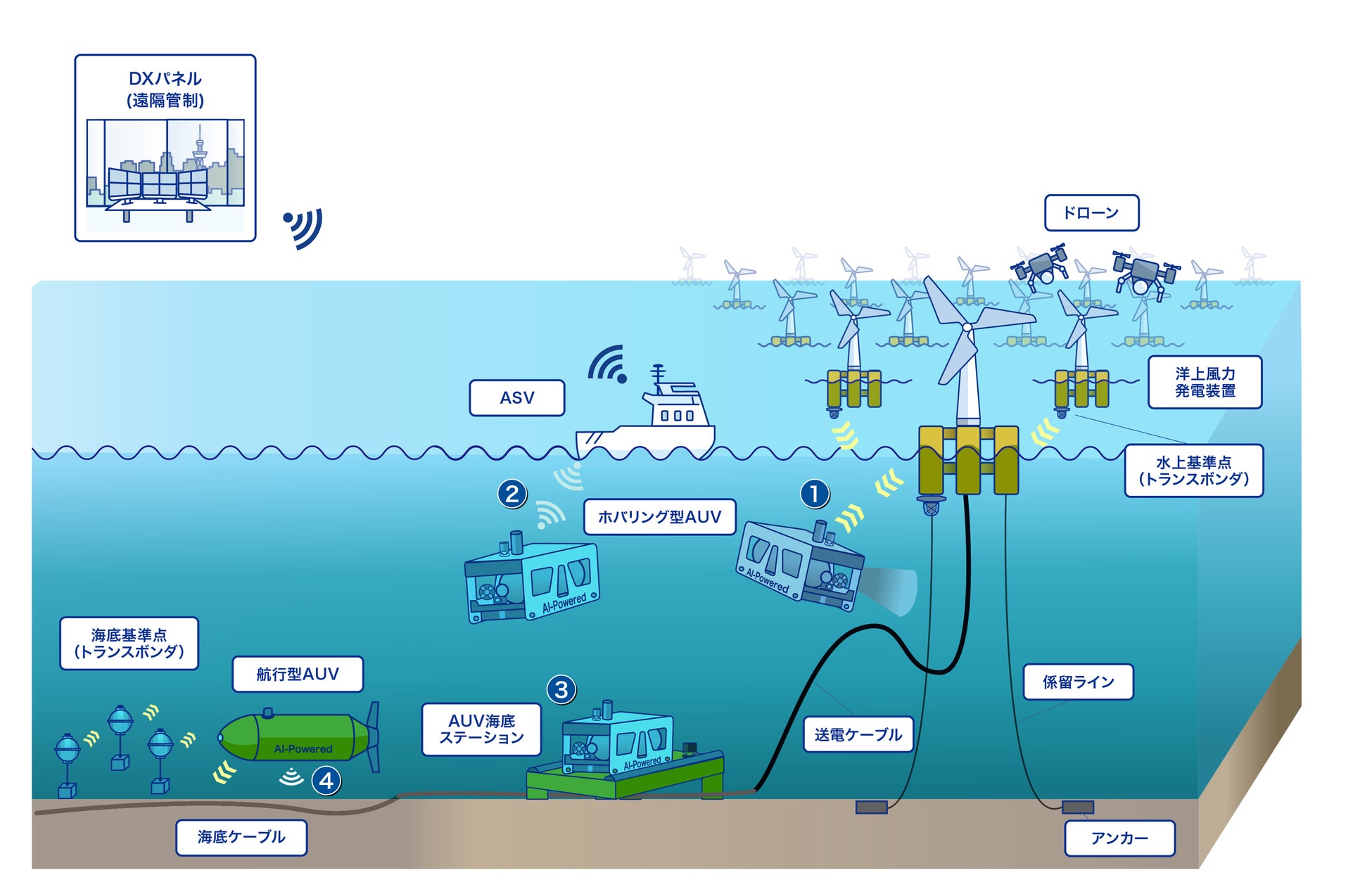
基於實證試驗中提取的課題,以提高離岸風力發電設備水下部分檢查作業的效率和降低成本為目的,探討了2030年和2040年的水下檢查系統的未來願景。具體而言,考慮了結合ASV和AUV的系統構成,以實現廣泛區域的檢查作業的自主化和無人化,同時考慮了AUV等海洋機器人的最佳配置。此外,還整理了AUV等在2030年早期社會實證化的里程碑,包括持續的技術開發和驗證、長期實證試驗的實施等,並作為路線圖提出。
2040年預想的利用AUV等海洋機器人進行檢查系統的未來願景*⁵ ① 懸停型AUV透過水面基準點的定位支援來掌握自身位置,並檢查錨泊纜繩、輸電電纜等。② ASV透過水下通訊接收AUV收集的數據,並傳輸至DX面板。③ AUV在自身電池電量下降時,會自主移動至海底基站進行充電和數據通訊。④ 航行型A
常見問題
What is the main goal of the proposed roadmap?
The main goal is to achieve the social implementation of a system for unmanned underwater inspection of offshore wind power generation facilities using AUVs and other marine robotics, aiming to reduce risks and improve efficiency and cost-effectiveness.
Which companies are collaborating on this project?
The collaborating companies are Toyo Engineering Corporation (TOYO), NIPPON STEEL ENGINEERING CO., LTD. (NSE), FullDepth Co., Ltd., and OKI Electric Industry Co., Ltd. (OKI).
What was the purpose of the demonstration test conducted in October 2025?
The demonstration test was conducted to extract technical and operational challenges for the autonomy and unmanned operation of underwater inspection work, using a combination of ROVs, ASVs, and AUVs on underwater targets.
What are the target years for the proposed roadmap?
The roadmap proposes future visions for the underwater inspection system for the years 2030 and 2040.
What kind of technology is being utilized for unmanned inspection?
The system utilizes Autonomous Underwater Vehicles (AUVs), Remotely Operated Vehicles (ROVs), and Autonomous Surface Vehicles (ASVs), along with marine robotics and underwater communication technologies.