Toyo Engineering Corporation (President & CEO: Eiji Hosoi, hereinafter TOYO), NIPPON STEEL ENGINEERING CO., LTD. (President: Ishiwa Yukito, hereinafter NSE), FullDepth Co., Ltd. (President: Tomoji Yoshiga, hereinafter FullDepth), and OKI Electric Industry Co., Ltd. (President & CEO: Takahiro Mori, hereinafter OKI) have jointly proposed a roadmap for the social implementation of a system to unmanned underwater inspection of offshore wind power generation facilities using AUVs*¹ (Autonomous Underwater Vehicles), etc. This roadmap organizes the future vision of underwater inspection systems using AUVs, etc., with the aim of reducing risks and achieving unmanned operations in underwater inspection work for offshore wind power generation facilities, which are expected to expand in the future. This project was carried out based on its adoption for the "Demonstration Project for the Use of Autonomous Underwater Vehicles (AUVs)" by the Integrated Headquarters for Ocean Policy, Cabinet Office.
Overview of Demonstration Test In preparation for creating the roadmap, a demonstration test combining ROVs*² (Remotely Operated Vehicles), ASVs*³ (Autonomous Surface Vehicles), and AUVs was conducted in Numazu City, Shizuoka Prefecture in October 2025. In this demonstration test, inspection work was performed on the underwater parts of the observation targets*⁴ using video imaging and sonar (detection using sound waves), and technical and operational challenges (underwater inspection methods, operational systems, etc.) for the autonomy and unmanned operation of underwater inspection work were extracted. For details on this demonstration test, please watch the PR video here: https://youtu.be/GWxvVzF5R9M
Demonstration Test PR Video: This video clearly explains the background of the demonstration test, the test itself, and the test results.
Proposal of Roadmap for Social Implementation of AUVs Based on the challenges identified in the demonstration test, the future vision of the underwater inspection system for 2030 and 2040 was considered with the aim of improving the efficiency and reducing the cost of underwater inspection work for offshore wind power generation facilities. Specifically, the optimal placement of marine robotics such as AUVs was considered, including a system configuration that combines ASVs and AUVs to perform wide-area inspection autonomously and unmanned. In addition, milestones for the early social implementation of AUVs, etc., by 2030 were organized and proposed as a roadmap, including continuous technological development and verification, and long-term implementation tests.
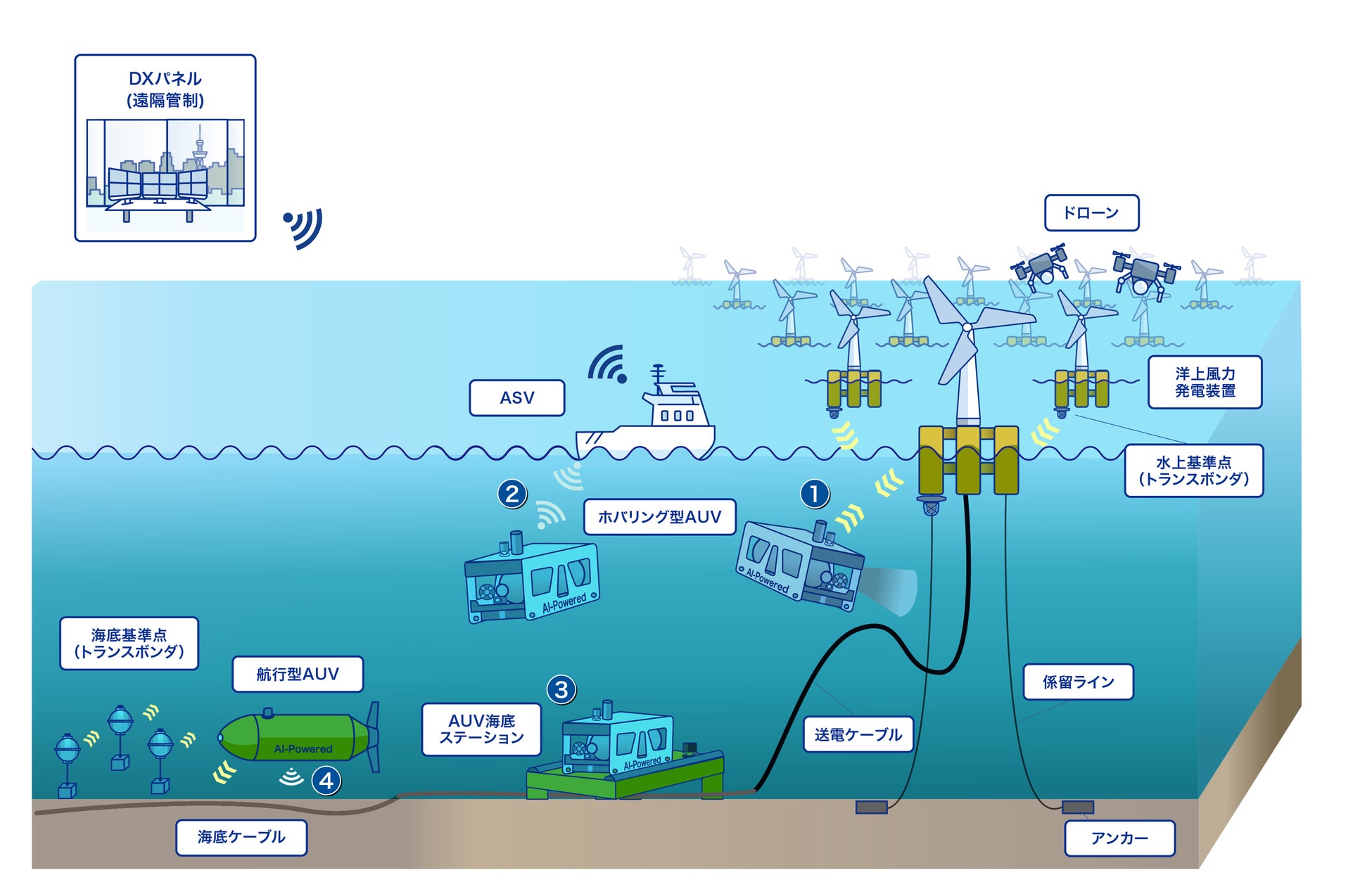
Future vision of inspection system utilizing marine robotics such as AUVs envisioned for 2040*⁵ ① Hovering-type AUVs grasp their own position by supporting positioning with water surface reference points and inspect mooring lines, power cables, etc. ② ASVs receive data collected by AUVs via underwater communication and transmit it to the DX panel. ③ When the AUV's own battery level drops, it autonomously moves to the seabed station for charging and data communication. ④ Navigational A
FACT BOX
- Source: PR TIMES
- Category: News