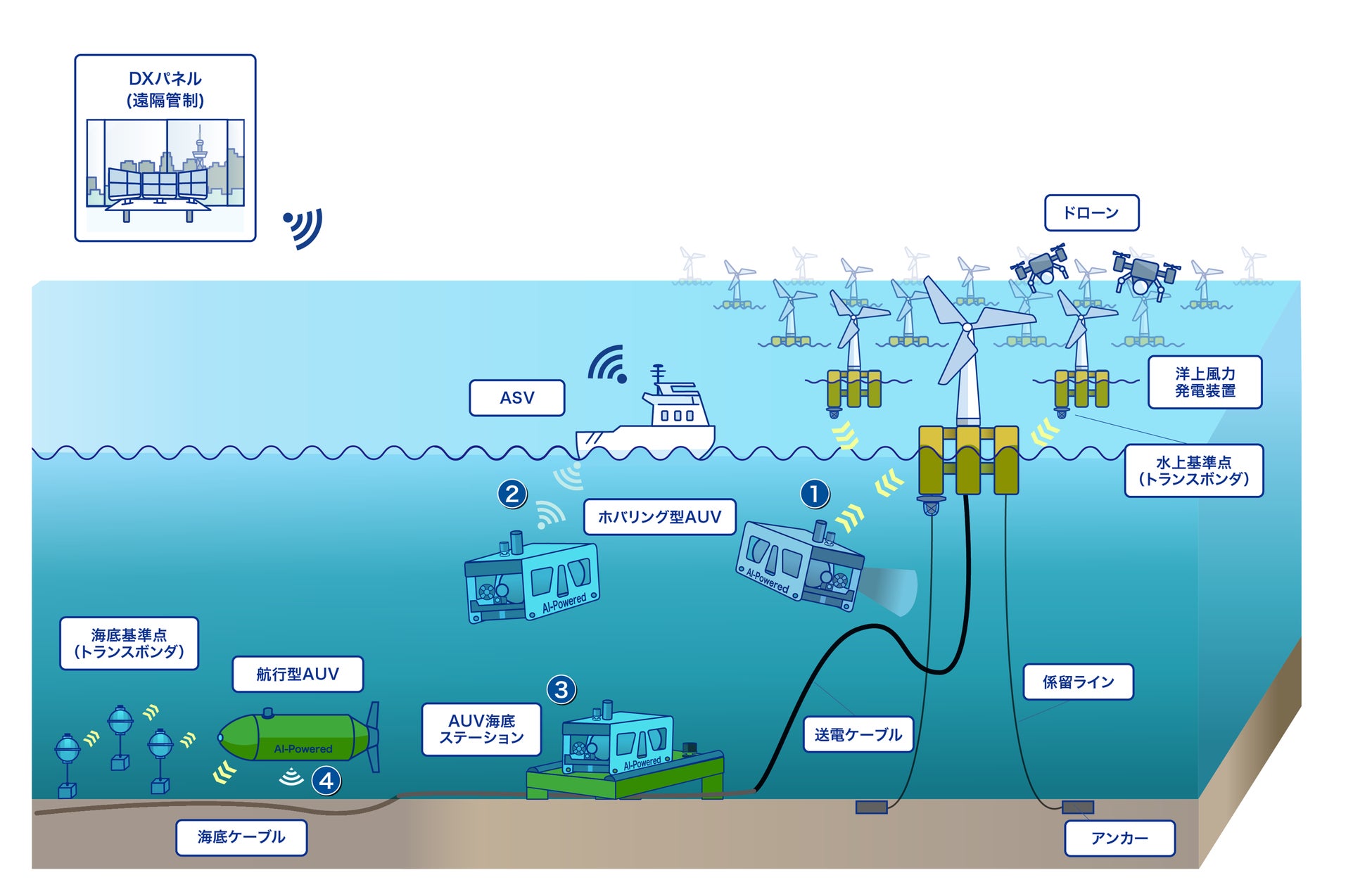
FullDepth 公司(代表取締役社長 吉賀智司,以下稱 FullDepth)與東洋工程株式會社(代表取締役社長 細井榮治,以下稱 TOYO)、新日鐵工程株式會社(代表取締役社長 石倭行人,以下稱 NSE)、沖電気工業株式會社(代表取締役社長 森孝廣,以下稱 OKI)共同實施了旨在實現洋上風力發電設備水下檢查作業無人化的實證試驗,該試驗利用了 AUV*1(自主式水下載具)。 本次實證試驗結合了 FullDepth 公司搭載遠端遙控技術及自動導航功能的 ROV*2(遙控無人載具)、本公司合作夥伴 Eightknot 公司(所在地:大阪府堺市,代表取締役:木村裕人)所有的 ASV*3(自主式水面載具),以及本公司共同研究夥伴東京大學生產技術研究所卷研究室*4 所擁有的 AUV。試驗在 OKI 公司所有的駁船上進行,模擬了浮動式洋上風力發電設備的水下檢查。 透過本次實證試驗,FullDepth 公司展示了利用 AUV、ROV 及 ASV 進行洋上風力發電設備水下檢查的現狀,並提煉出利用這些載具實現設備水下檢查無人化的技術及營運課題,同時提出了 AUV 等海洋機器人社會實證化的具體未來展望。本事業是基於獲得內閣府綜合海洋政策推進事務局「自主式水下載具(AUV)利用實證事業」的認可而實施的。 ■ 實證試驗概要 2025 年 10 月,在靜岡縣沼津市實施了結合 ROV、ASV 及 AUV 的實證試驗,利用影像及聲納(透過聲波進行探測)對觀測對象*5 的水下部分進行了檢查作業。透過實證試驗,我們提煉出了實現洋上風力發電設備水下檢查作業自主化及無人化的技術及營運課題(例如:水下部分的檢查方法、營運體制等)。關於本次實證試驗的詳細資訊,請參閱此 PR 影片。
實證試驗 PR 影片:可觀看實證試驗的背景、試驗情況及試驗結果。 ■ AUV 社會實證化路線圖提案 基於實證試驗中發現的課題,我們考慮了預計在 2030 年及 2040 年實現的水下檢查系統的未來願景,旨在更有效率且低成本地實施洋上風力發電設備的水下檢查作業。具體而言,我們考慮了結合 ASV 與 AUV 的系統構成,以實現廣泛區域的自主無人檢查作業,並意識到 AUV 等海洋機器人的最佳配置。同時,我們整理了 AUV 等在 2030 年早期實現社會實證化所需的里程碑,包括持續的技術開發、驗證及長期實證試驗等,並將其作為路線圖提出。
<figcaption class="pr-img__item__capt
FACT BOX · 重點整理
- 來源:PR TIMES
- 分類:調查
- 相關組織:株式会社FullDepth / 沖電気工業株式会社 (OKI) / 東京大学 (生産技術研究所巻研究室)
- 原文日期:2025年10月 / 2030年
- 產品、服務:AUV (自律型無人探査機) / ROV (遠隔操作型無人潜水機)