【AGIRobots Inc.】Successfully Developed Prototype of In-house QDD Actuator — Promoting Localization of Core Robot Components
AGIRobots Inc. has completed the development and basic operational verification of its in-house QDD actuator prototype, a core robot component. Aiming to reduce reliance on overseas products, the company has developed a compact 30Nm-class prototype for arm robots, seeking to localize crucial components that define robot performance. This initiative contributes to stabilizing the supply of robot parts within Japan.
📋 Article Processing Timeline
- 📰 Published: April 1, 2026 at 04:51
- 🔍 Collected: April 1, 2026 at 01:00
- 🤖 AI Analyzed: April 22, 2026 at 04:19 (507h 18m after Collected)
AGIRobots Inc. (Headquarters: Nagoya City, Aichi Prefecture; Representative Director: Atsuki Akamisaka) is pleased to announce the commencement of development of its own QDD (Quasi Direct Drive) actuator, with the completion of prototype design, manufacturing, and basic operational verification.
Background on the Importance of QDD
QDD is a drive system that combines a gearbox with a relatively low reduction ratio and a high-output motor, making it easy to achieve both high output, responsiveness, and controllability. In recent years, it has become one of the important technologies for robots that require agile and delicate movements, such as quadruped robots and humanoid robots.
Currently, there is a high reliance on overseas products for actuators, especially QDDs, which are core components of robots.
On the other hand, with the advancement of Physical AI and the sophistication of robots, actuators are no longer just components, but are becoming critical elements that define the robot's performance itself.
We believe that for robot manufacturers to enhance their competitiveness in the future, it will be crucial to establish a system where they can design and develop actuators themselves, rather than depending on external sources. Furthermore, from the perspective of geopolitical risks and supply constraints, the importance of establishing a domestic development and supply system is expected to increase even further.
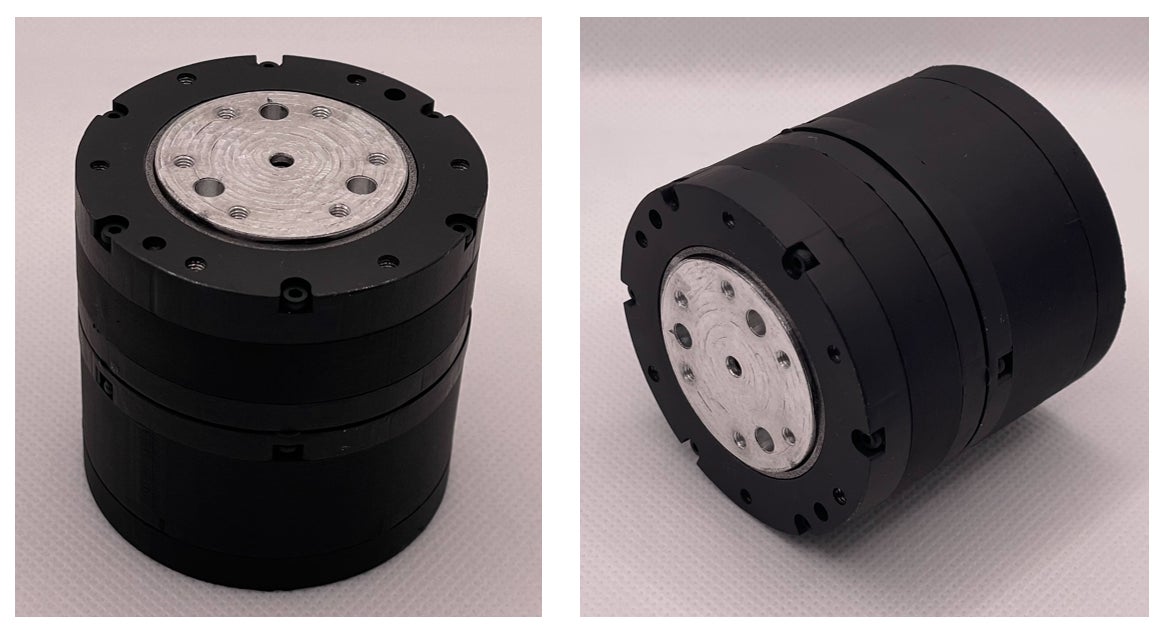
About the Developed Prototype
Against this background, our company is working on the in-house production of QDD actuators, including the gearbox, motor, and control system. By establishing a system that allows us to design the foundation of joint drive from the ground up, rather than simply procuring finished products, we aim to optimize the performance of our own robots and establish a future competitive advantage.
The prototype developed this time is primarily intended for arm robot applications, with a configuration targeting approximately 30Nm output. Its main features are as follows:
-
Compact design with an outer diameter of 57mm
-
Gearbox designed and manufactured in-house
-
Adoption of BLDC motor
-
Adoption of dual encoder configuration
In particular, the fact that the gearbox is designed and manufactured in-house is a major feature. We have also adopted a BLDC motor as the driving source, with a configuration that anticipates the output performance and responsiveness required for robot applications. Furthermore, by adopting a dual encoder configuration, it is easier to grasp the status of both the motor side and the output side, improving operability including initial position alignment and recovery operations.
Prototype Drive Video
This initiative is not just a conceptual stage; basic operational verification has already been completed with the prototype. Our company emphasizes proceeding with verification on actual machines rather than just concepts, and this prototype development is part of that effort.
Prototype drive demo video (YouTube)
Future Outlook
This actuator...